

В настоящее время технология GPS (Global Positioning System – глобальная спутниковая навигационная система) является важнейшей частью современной технологичной инфраструктуры. Используя соответствующее оборудование, мы имеем возможность получать точное время и координаты объектов в любой точке земного шара. GPS широко применяется для создания точных географических и геодезических карт, при навигации наземного, воздушного и морского транспорта, для определения координат беспилотных летательных аппаратов, отслеживания мобильных аварийных маяков, миграции рыбы, животных и так далее.
Для моделирования, прототипирования, проектирования, разработки или тестирования при серийном производства GPS-устройств, необходимо создать естественные условия с GPS-сигналом, абсолютно таким же сигналом, как от спутников GPS-системы. Существует два основных способа получить такой GPS-сигнал:
- реальный GPS-сигнал от спутников системы GPS, которые располагаются на высоте 20000 километров от поверхности Земли (так называемый Live Sky способ)
- симулированный GPS-сигнал, который генерирует портативный настольный или напольный генератор GPS-сигнала.
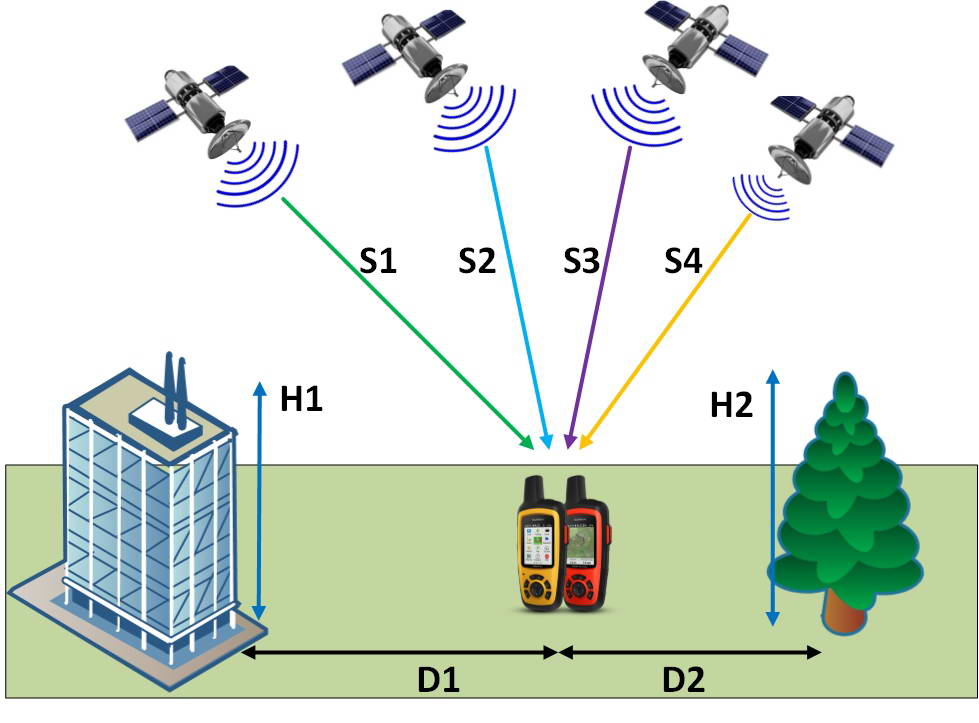 |
| Рисунок 1 – работа GPS-устройства вблизи высотных объектов |
Рассмотрим эти два способа. Первый способ самый простой, но из-за постоянного движения спутников навигационной системы практически невозможно несколько раз провести испытания GPS-устройства при одних и тех же характеристиках GPS-сигнала. Более того, крайне сложно создать условия для приема идеального или искаженного GPS-сигнала. Например, для достижения максимальной точности определения координат и времени все производители GPS-оборудования рекомендуют размещать антенну на расстоянии D ≥ H от высотного объекта (здание, дерево и т.д.), где H - высота объекта, (рисунок 1). Очевидно, что в условиях города выполнить это условие практически невозможно. Кроме того, на GPS-устройство поступает не идеальный сигнал от спутников (как на рисунке 1), а сигнал, который подвержен интерференции, переотражению и значительному ослаблению из-за высотных зданий, мостов, рельефа местности (рисунок 2). Так же, необходим GPS-сигнал, параметры и характеристики которого мы можем свободно и легко менять. К сожалению, влиять на характеристики реального GPS-сигнала практически не возможно. Но такой возможностью обладает стационарный GPS-генератор. Он симулирует GPS-сигнал, в котором можно: задавать количество спутников (от 1 до 12); устанавливать мощность передатчика каждого спутника; имитировать движение спутников на орбите, тем самым создавая движение объектов испытаний; задавать любые координаты расположения объекта на поверхности земли и в воздухе; имитировать движение объекта с любой скоростью и любыми координатами и так далее.
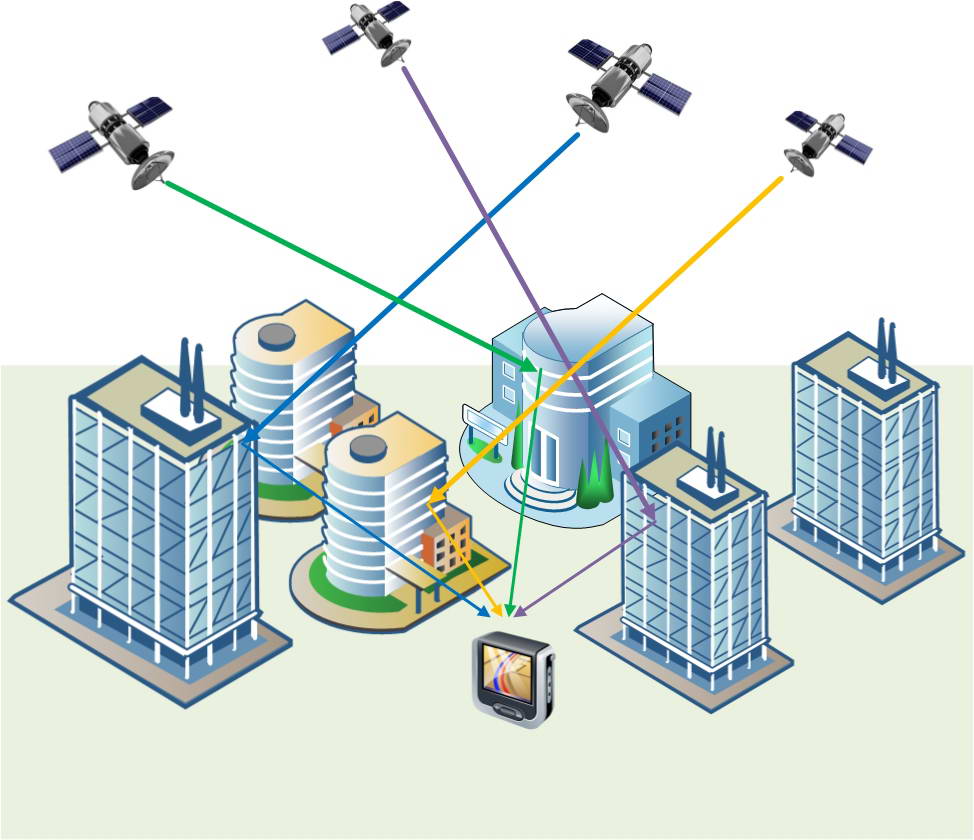 |
| Рисунок 2 – Интерференция, переотражение и ослабление GPS-сигнала |
Для понимания того, какие сигналы генерирует GPS-генератор, рассмотрим основы работы системы GPS (рисунок 1). Система GPS состоит из 24 спутников, каждый из которых совершает полный оборот вокруг земного шара за 12 часов и передает информацию на землю на нескольких несущих частотах. Из любой точке земного шара в данный момент времени видно максимум 12 спутников. В настоящее время большинство потребительских GPS-устройств и микросхем используют несущую частоту GPS L1 = 1575,42 МГц. На этой частоте каждый спутник передает навигационные сообщения, которые содержат данные о расположении этого спутника на орбите (ephemeris - эфемерис), о расположении остальных спутников GPS (almanac - альманах) и очень точное время GPS. GPS-устройство, приняв эти данные от спутников и определив расстояния S1, S2, S3, S4 (рисунок 1), вычисляет с очень высокой точностью свои координаты и время в системе GPS.
GPS-генератор GPS-Gen-1001, который разработан нашей компанией, имитирует GPS-сигнал с несущей частотой GPS L1. Сигнал генератора абсолютно идентичен сигналам спутников навигационной системы GPS/ГЛОНАСС. Кроме того, генератор GPS-Gen-1001 дает возможность изменять характеристики GPS-сигнала, например, имитировать интерференцию и ослаблять сигнал, динамически изменять координаты, имитируя движение GPS-устройства. Таким образом, создаются все необходимые условия для изучения, исследования, разработки, тестирования и испытания GPS-устройств и систем на их основе в условиях закрытого помещения.
Генератор GPS-Gen-1001 обладает следующими основными возможностями:
- генерирует сигнал на одной из следующих несущих частот: GPS L1=1575.42 МГц, L2=1227.60 МГц, ГЛОНАСС L1=1602 МГц, L2=1246 МГц;
-
изменяет мощность сигнала от -145 dBm до +10 dBm;
-
генерирует непрерывный GPS-сигнал в течение 24 часов;
-
генерирует сигнал от 1 до 12 спутников одновременно;
-
имитирует изменение координат и времени GPS-приемника;
-
имитирует движение GPS-приемника по заданной траектории (при этом сам GPS-приемник остается неподвижным);
-
имитирует сложные траектории движения GPS-приемника (к примеру, с несколькими точками траектории, в которых происходит изменение направления движения. Координаты этих точек устанавливаются пользователем);
-
имитирует движение GPS-приемника с различной скоростью;
-
изменяет уровень сигнала каждого спутника в пределах ±30 dBm относительно опорного уровня;
-
генерирует кадры времени в формате TAI;
-
генерирует на дополнительном цифровом выходе синхронизированные с временем GPS кадры IRIG-B, 1588-2008;
- генерирует на дополнительном цифровом выходе импульсы PPS (Pulse Per Second).
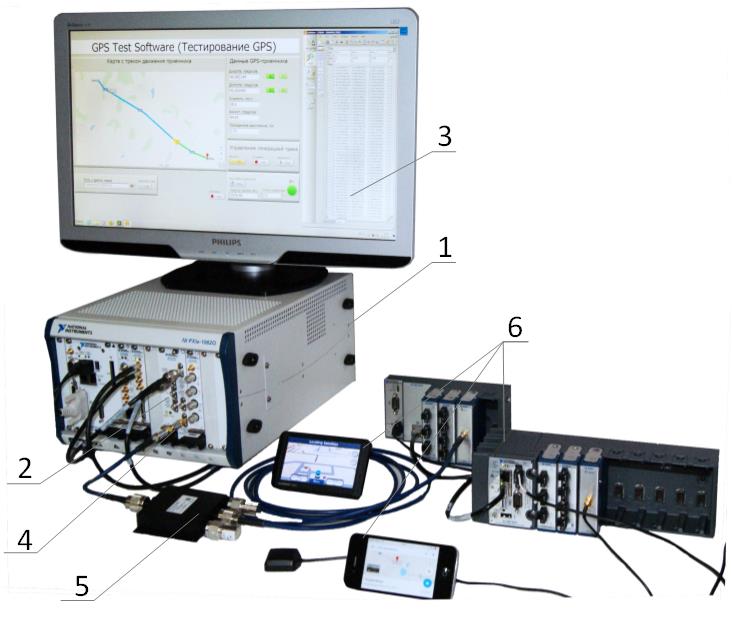 |
| Рисунок 3 – Генератор GPS-Gen-1001 |
На рисунке 3 изображен генератор GPS-сигнала GPS-Gen-1001 20-01. Он состоит из PXI-шасси с контроллером (1) и векторным генератором ВЧ-сигнала. Все режимы работы генератора и настройка его функций идет через наше программное обеспечения GPS Test Software (3). Высокочастотный выход GPS-генератора подключен к тестируемым GPS-устройствам (6) через аттенюатор (4) и разветвитель GPS-сигнала (5).
Также, генератор GPS-Gen-1001 позволяет определять характеристики GPS-приемников. Это нужно как для понимания или изучения принципа их работы, так и для определения соответствия этих характеристик техническим требованиям вашего проекта. Возможно тестировать следующие важнейшие характеристики GPS-устройства:
- чувствительность (при уровне сигнала от -130 dBm и ниже) – определяет, при каком минимальном уровне сигнала GPS-устройство сможет определять время и позицию. Чем ниже ее величина, тем в более сложных условиях приема может работать GPS-устройство (например, антенна устройства находится вблизи высотного здания, и GPS-сигнал очень слабый).
-
минимальная величина соотношения сигнал-шум при которой GPS-устройство может определять позицию и время (Carrier/Noise от 28 до 32 dB-Hz). Чем ниже ее величина, тем более устойчиво GPS-устройство работает при высоком уровне электромагнитных помех (например, при интерференции относительно слабого (-130 dBm) GPS-сигнала и относительно сильного (-100...-70 dBm) сигнала LTE-сети).
- минимальное время до определения позиции после включения GPS-устройства (TTFF – Time To First Fix) - определяет, насколько быстро устройство определит свои время и позицию после включения. К примеру, данная характеристика очень важна для GPS-навигаторов наземного транспорта, задача которых – сразу после включения сообщать водителю, на каком участке дороги он находится;
- Position Accuracy and Repeatability - ошибка при определении координат GPS-устройства. Чем ниже ее величина, тем более точно устройство определяет позицию.
На базе генератора GPS-Gen-1001 можно создать высокочастотный комплекс, который может генерировать или анализировать сигналы от 250 кГц до 2,7 ГГц. В диапазоне этих частот находятся устройства, работающие по стандартам Wi-Fi, ZigBee, GSM, EDGE/GPRS, UMTS, LTE, WiMAX, Bluetooth. По аналогии с GPS, такой комплекс генерирует сигнал, полностью идентичный сигналу, с которым работает ВЧ-устройство. Таким образом, можно проектировать, прототипировать, тестировать вышеуказанные устройства.
Таким образом, генератор GPS-Gen-1001-1001 можно использовать для полной имитации реальных условий эксплуатации GPS-устройства в условиях закрытого помещения. При необходимости, одновременно возможно работать с большим количеством GPS-устройств (до нескольких десятков или даже сотен). Все это существенно сокращает время, снижает риски и уменьшает стоимость ошибки при прототипирование, разработке, исследовании, испытании или серийном производстве как GPS-устройств и систем на основе GPS, так и сборок, оснащенных GPS-чипами.